π导航 
【首页】
UR机械臂python 控制库URX【2025-12-08】 【 Universal Robot机械臂属于6自由度机械臂,这里不多赘述。在对ur机械臂的高级控制开发(视觉案例)中,肯定要通过remote PC发送URScript来控制,但是自己来写socket等等还是过于麻烦,这里介绍urx。 SintefRaufossManufacturing/python-urx 通过urx控制ur机械臂很简单直接,可以直接绕开ROS 非常的简单,可以很容易与python的其他模块结合。但是文档比较单一,所以推荐的是UR 官方给出的URScript介绍对照着看。 https://s3-eu-west-1.amazonaws.com/ur-support-site/29983/Script%20command%20Examples.pdf 苦于UR开发的工具太少,很多功能urx也满足不了。比如一个常用的是得到关节的速度向量,urx没有实现。通过查阅UR官方给出的Client interface, 发现在real time client模式下  得到的数据的格式表如下 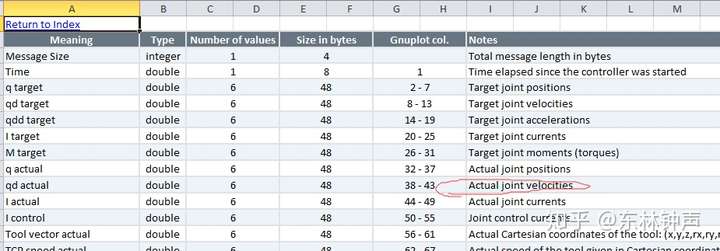 是有速度的数据的。但是urx的实现里面只有得到角度的函数 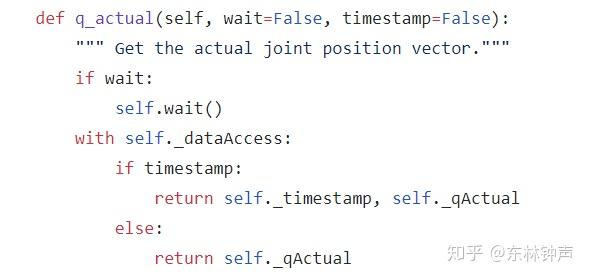 再看urx里面处理socket得到数据的函数, 在https://github.com/SintefRaufossManufacturing/python-urx/blob/master/urx/urrtmon.py里面 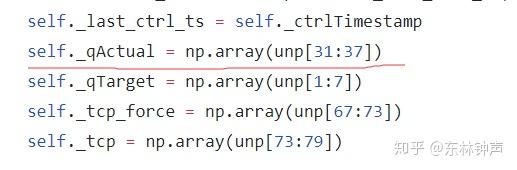 咦, 是不是发现了什么,urx这里只索引了角度,速度放弃了,所以加上索引后就可以得到了。修改如下。 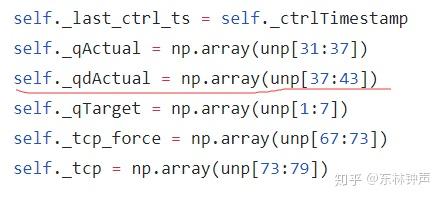 然后还有些其他的代码以及使用方法,我放在我fork的urx里面。连接在下面 Ojbk, 到这里了。还是觉得UR相关的资料不多,一定要有很多拿来就可以用的代码、库还有接口,这样才行。所以会慢慢整理。 |
copyright©2018-2025 gotopie.com